Rezervni deli ojnice za nakladalec na kolesih za nakladalec na kolesih XCMG Liugong

Ojnica
Ker je nadomestnih delov veliko, ne moremo vseh prikazati na spletni strani. Prosimo, kontaktirajte nas za določene.
Prednost
1. Za vas dobavljamo originalne in poprodajne izdelke
2. Neposredno od proizvajalca do kupca, kar vam prihrani stroške
3. Stabilna zaloga za običajne dele
4. V času dostave, s konkurenčnimi stroški pošiljanja
5. Strokovno in pravočasno po vročitvi
Pakiranje
Kartonske škatle ali po želji stranke.
opis
Funkcija ojnice je povezati bat in ročično gred, tako da izmenično linearno gibanje bata postane rotacijsko gibanje gonilke za izhodno moč.
Telo ojnice je sestavljeno iz treh delov, del, povezan z batnim zatičem, se imenuje majhen konec ojnice; del, povezan z ročično gredjo, se imenuje veliki konec ojnice, drog, ki povezuje mali in veliki konec, pa se imenuje gred ojnice. Majhna glava ojnice je večinoma tankostenska okrogla obročasta struktura. Da bi zmanjšali obrabo med batnim sornikom in batnim sornikom, je v majhno luknjo glave vtisnjena tankostenska bronasta puša. Izvrtajte ali rezkajte utore na majhni glavi in puši, da razpršeno olje vstopi v spojno površino mazalne puše in bata. Gred ojnice je dolga palica, sila pa je tudi velika pri delu. Da bi preprečili njegovo upogibanje in deformacijo, mora imeti gred zadostno togost.
Glede na to, ali je relativno gibanje med komponentami ravninsko gibanje ali prostorsko gibanje, lahko povezovalni mehanizem razdelimo na ravninski povezovalni mehanizem in prostorski povezovalni mehanizem. Mehanizem ravninske povezave je običajen prenosni mehanizem. To pomeni, da so vse toge komponente povezane z nizkimi pari, zato se imenuje tudi mehanizem nizkih parov. Ravninski povezovalni mehanizem se pogosto uporablja v različnih strojih, instrumentih in krmilnih napravah. Kot so batni motorji, črpalke in zračni kompresorji, kot tudi skobeljni stroji, stroji za urezovanje, bagri, nakladalniki, čeljustni drobilniki, nihajni transporterji, tiskarski stroji, tekstilni stroji itd., so glavni mehanizmi ploščati mehanizmi. Če se komponente v povezovalnem mehanizmu ne premikajo v isti ravnini ali vzporedno druga z drugo, se mehanizem imenuje prostorski mehanizem. [3] Glede na število komponent v mehanizmu je razdeljen na mehanizem s štirimi palicami, mehanizem s petimi palicami, mehanizem s šestimi palicami itd. Na splošno se mehanizme s petimi palicami in več kot petimi palicami imenuje več -palični mehanizmi. Ko je stopnja svobode povezovalnega mehanizma 1, se imenuje povezovalni mehanizem z enojno stopnjo svobode; kadar je stopnja svobode večja od 1, se imenuje povezovalni mehanizem z več stopnjami svobode.
Glede na to, ali je kinematična veriga, ki tvori povezovalni mehanizem, odprta ali zaprta veriga, lahko ustrezen povezovalni mehanizem razdelimo tudi na odprtoverižni povezovalni mehanizem (manipulator je običajno prostorski odprtoverižni povezovalni mehanizem, v katerem je kinematični par rotacijski par oz. gibljivi par) In povezovalni mehanizem zaprte verige. Število komponent posameznega planarnega povezovalnega mehanizma z zaprto zanko je vsaj 4, tako da je najenostavnejši ravninski zaprtoverižni povezovalni mehanizem štiripalični mehanizem, drugi veččlenski zaprti verižni mehanizmi pa niso nič drugega kot razširitev skupina palic na njegovi osnovi; enojna zaprta zanka Število komponent prostorskega veznega mehanizma je vsaj 3, tako da lahko tri komponente tvorijo prostorski tripalični mehanizem.
Komponente veznega mehanizma imajo različne oblike gibanja, kot so rotacija, nihanje, gibanje in kompleksno gibanje v ravnini ali prostoru, ki jih je mogoče uporabiti za realizacijo znanih zakonov gibanja in znanih trajektorij.
Prednosti
(1) Nizek par: površinski stik, velika nosilnost, enostaven za mazanje, ni enostaven za nošenje, enostavna oblika, enostavna obdelava, enostavno doseganje visoke proizvodne natančnosti.
(2) Spreminjanje relativne dolžine palice je zakon gibanja sledilca drugačen.
(3) Stik med dvema komponentama se vzdržuje z lastnim geometrijskim zapiranjem, za razliko od odmičnih mehanizmov, ki morajo včasih uporabiti vzmeti in drugo silo zapiranja, da ohranijo stik.
(4) Krivulja ojnice je bogata, kar lahko izpolni različne zahteve.
Slabosti
(1) Obstaja veliko komponent in parov gibanja, velika kumulativna napaka, nizka natančnost gibanja in nizka učinkovitost.
(2) Ustvari se dinamična obremenitev (vztrajnostna sila), ki je ni enostavno uravnotežiti in ni primerna za visoke hitrosti.
(3) Zasnova je zapletena in težko je doseči natančne trajektorije.
Zato se ravninski povezovalni mehanizem pogosto uporablja v različnih strojih, instrumentih in elektromehanskih izdelkih. Z razvojem metod oblikovanja povezovalnih mehanizmov, priljubljeno uporabo elektronskih računalnikov in razvojem sorodne programske opreme za načrtovanje sta se hitrost načrtovanja in natančnost načrtovanja povezovalnih mehanizmov močno izboljšali, ob izpolnjevanju kinematičnih zahtev pa se lahko šteje tudi za dinamika. Zlasti uvedba mikroelektronske tehnologije in tehnologije samodejnega krmiljenja ter sprejetje povezovalnega mehanizma z več stopnjami svobode močno poenostavita strukturo in zasnovo povezovalnega mehanizma in imata širši obseg uporabe.
Naše skladišče1

Zapakirajte in pošljite

- Zračno dvigalo
- Kitajski prekucnik
- Cold Recycler
- Podloga stožčastega drobilnika
- Stranski dvigalo kontejnerja
- Del buldožer Dadi
- Priključek za pometanje viličarja
- Hbxg deli za buldožerje
- Deli motorja Howo
- Hidravlična črpalka za bager Hyundai
- Deli za buldožerje Komatsu
- Zobna gred bagra Komatsu
- Hidravlična črpalka za bager Komatsu Pc300-7
- Deli buldožerjev Liugong
- Rezervni deli za črpalke za beton Sany
- Rezervni deli za bagre Sany
- Deli motorja Shacman
- Gred sklopke buldožerja Shantui
- Zatič povezovalne gredi buldožerja Shantui
- Fleksibilna gred za krmiljenje buldožerja Shantui
- Fleksibilna gred buldožerja Shantui
- Komplet za popravilo dvižnega cilindra buldožerja Shantui
- Deli buldožerjev Shantui
- Gred koluta buldožerja Shantui
- Gred vzvratnega menjalnika buldožerja Shantui
- Rezervni deli za buldožerje Shantui
- Pogonska gred vitla buldožerja Shantui
- Buldožerski vijak Shantui
- Shantui Dozer Front Idler
- Komplet za popravilo nagibnega cilindra buldožerja Shantui
- Stožčasti zobnik Shantui Sd16
- Zavorne obloge Shantui Sd16
- Sklop vrat Shantui Sd16
- O-obroč Shantui Sd16
- Gosenica Shantui Sd16
- Ležajni tulec Shantui Sd22
- Torni disk Shantui Sd22
- Gosenica Shantui Sd32
- Deli motorja Sinotruk
- Avtovleka
- Deli za buldožerje Xcmg
- Rezervni deli za buldožerje Xcmg
- Hidravlična ključavnica Xcmg
- Prenos Xcmg
- Deli motorja Yuchai
Kategorije izdelkov
-
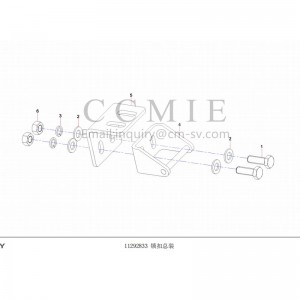
11292833 rezervni deli za bager sklop ključavnice
-

171-51-27000 Pokrov (za rahljalnik) Shantui SD32...
-
803081782 večpotni ventil rovokopač XCMG WZ30-25 ...
-

8053G0814 Podložka 10 XCMG LW600KN nakladalec na kolesih p...
-

16Y-18-00019 Leva zunanja lupina
-

P10Y-80-00005V010 Kotno rezilo noža za suho brušenje ...